
Whew, a bit behind in getting this log started, but here we are. My project for the contest is to create a fully custom-made force-feedback 2-axis joystick, for driving robots.
Feature/spec list
I've kinda neglected to document a lot of what I'd done so far, but I'll do my best to remember dates and facts.
Update 5/14/19
I completed a small portion of the software and hardware testing with the motors. I was successfully able to set a position for the PID controller to hold with the encoders, and the system would resist change to that position.
However, the motor drivers used are very large, and have a very non-linear input response. (i.e. 50% PWM signal != 50% power output) So I ordered a dual motor driver from Amazon.
Update 5/16/19
I received the new motor driver, and was severely disappointed in the performance. Compared to the previous test with the much more powerful driver, there was very little torque. This led to the start of the design of my motor driver PCB.
Update 6/7/19
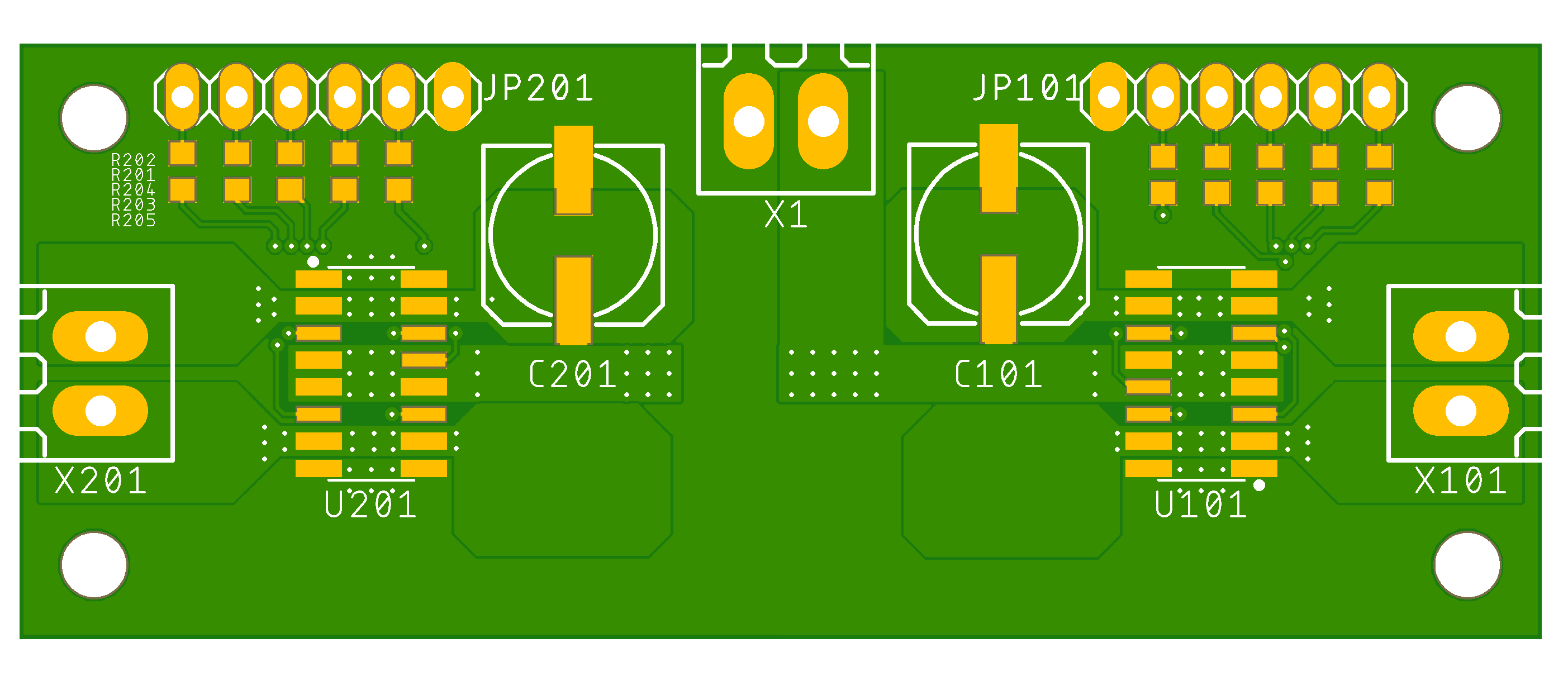
Here is the completed motor driver PCB. It will easily handle the power needed by the 2 motors that drive the joystick. This was completed 6/7/19.
Update 6/9/19, I've begun work on the CAD for the joystick frames. 4 main parts make up the assembly. The outer frame, pitch frame, roll frame, and shaft unit. A large inspiration for this design was found online, but all of the parts being used (other than fittings and bearings for the 5mm shaft) are going to be designed and made by me.
Feature/spec list
- 32 bit ARM processor (Teensy-based microcontroller)
- Custom motor driver PCB (using ST VNH7070AS drivers)
- dual technology positional feedback (potentiometers and encoders on each driven axis)
- High-frequency PID loop control for position and torque management (based on encoders and current draw)
- Custom PC application for tuning and calibration (stretch goal, 3D representation of stick in real-time)
I've kinda neglected to document a lot of what I'd done so far, but I'll do my best to remember dates and facts.
Update 5/14/19
I completed a small portion of the software and hardware testing with the motors. I was successfully able to set a position for the PID controller to hold with the encoders, and the system would resist change to that position.
However, the motor drivers used are very large, and have a very non-linear input response. (i.e. 50% PWM signal != 50% power output) So I ordered a dual motor driver from Amazon.
Update 5/16/19
I received the new motor driver, and was severely disappointed in the performance. Compared to the previous test with the much more powerful driver, there was very little torque. This led to the start of the design of my motor driver PCB.
Update 6/7/19
Here is the completed motor driver PCB. It will easily handle the power needed by the 2 motors that drive the joystick. This was completed 6/7/19.
Update 6/9/19, I've begun work on the CAD for the joystick frames. 4 main parts make up the assembly. The outer frame, pitch frame, roll frame, and shaft unit. A large inspiration for this design was found online, but all of the parts being used (other than fittings and bearings for the 5mm shaft) are going to be designed and made by me.