
- Joined
- Jul 27, 2017
- Messages
- 11
- Likes
- 24
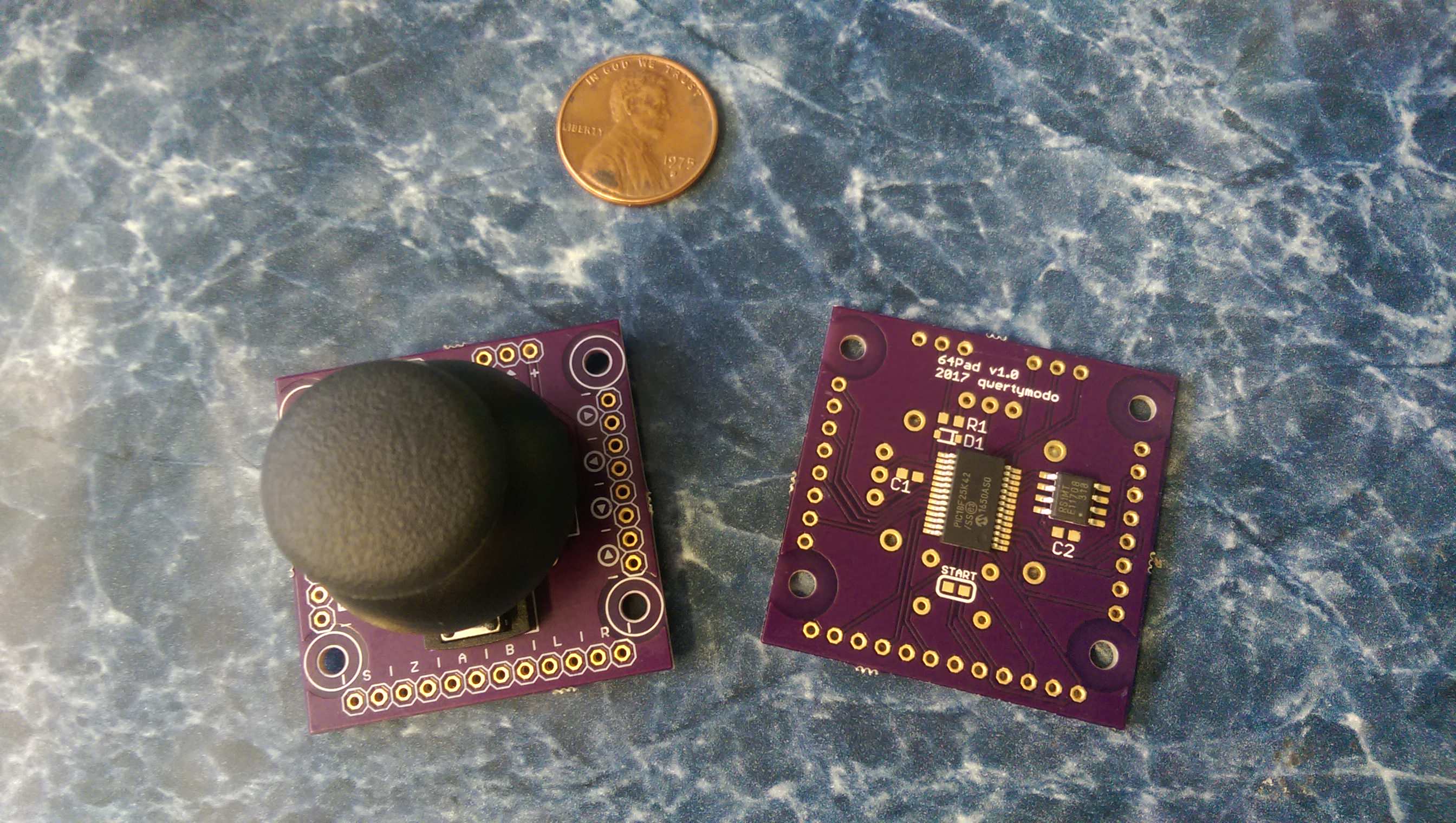
First post, ShockSlayer just introduced me to this board. Building a portable has been one of those projects I've always wanted to try, but it's a lot to take on, so I've taken it on in small pieces over the years. My latest mini project has been the controller. I've seen RDC's miNi64 boards, but I was looking for something built on an in-production chip more along the lines of this project. After playing around with it for a few weeks, I have most of the important pieces working, and sent out for PCB's. Of course, I discovered a schematic error that renders them useless 2 days after placing the order, but v1.1 boards should be coming soon. It uses a PS2 or GC joystick and includes an on-board 4x FRAM memory pak. It also supports rumble pak output, but I don't currently have the drive circuit figured out, so for now it's just a logic-level signal directly driven from an I/O pin. I might actually just leave it that way and offload the drive circuit to a separate board because that leaves the entire ICSP header accessible. I think it's pretty safe to say this is as small and simple as this is going to get. Just thought I'd share.
Last edited:

 Might just be easier to write it myself from the pseudocode
Might just be easier to write it myself from the pseudocode